Sea Ray L590
Le capacità di governo delle imbarcazioni: il moto rettilineo
Le condizioni di moto rettilineo di un’imbarcazione, al cessare delle cause perturbatrici, possono essere spontaneamente ristabilite secondo tre modi, rappresentati in Figura 3, che sono:
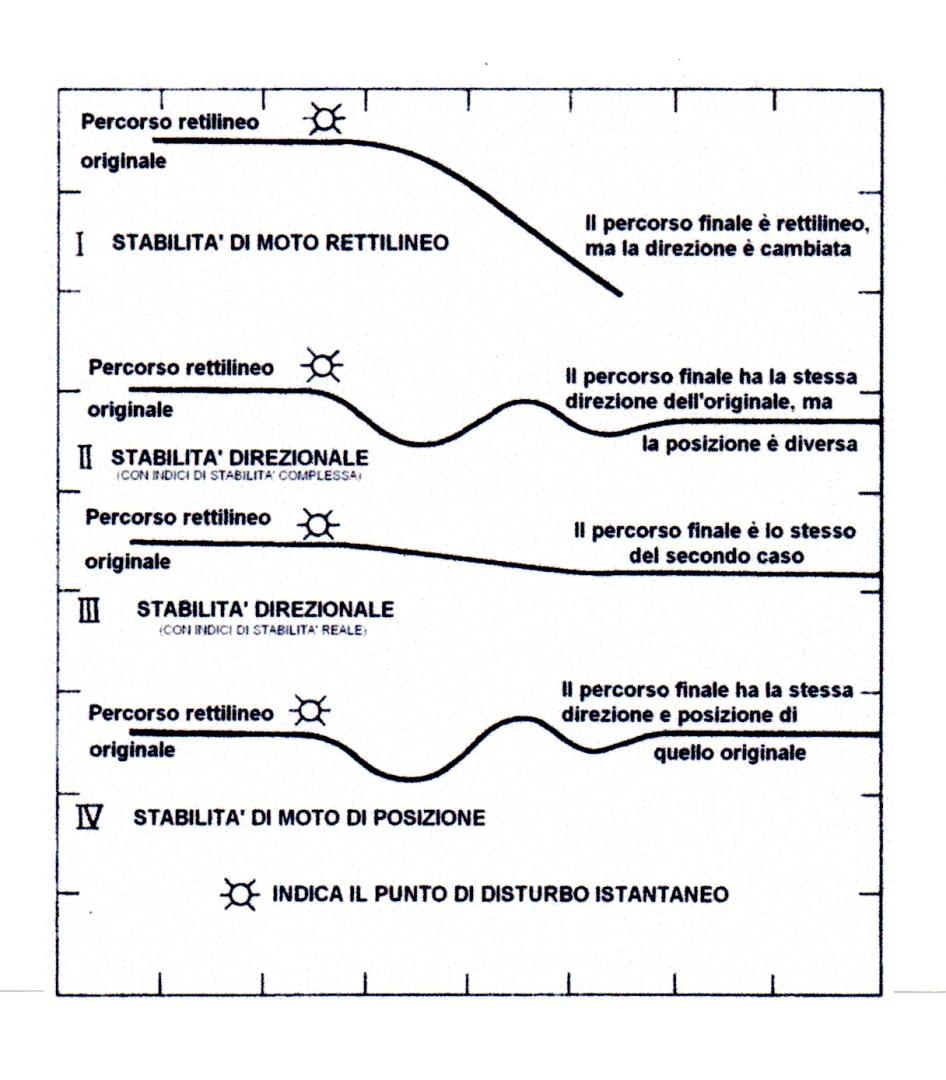
· Caso I: stabilità di moto rettilineo o di rotta rettilinea : quando l’imbarcazione, al cessare del disturbo, riprende spontaneamente il moto rettilineo su una direzione diversa dall’originale.
· Casi II e III: stabilità direzionale : quando l'imbarcazione, al cessare del disturbo, riprende, dopo una fase di moto direzionale vario, la stessa direzione originaria ma su un percorso spostato rispetto all’originario.
· Caso IV: stabilità di moto di posizione : quando l’imbarcazione, al cessare del disturbo, riprende lo stesso percorso originario.
Nei quattro casi citati non si considerano le azioni esercitate da organi di controllo poiché, dal punto di vista idrodinamico, il concetto di stabilità di rotta si associa alla capacità spontanea dell’imbarcazione di riportarsi nelle condizioni iniziali.
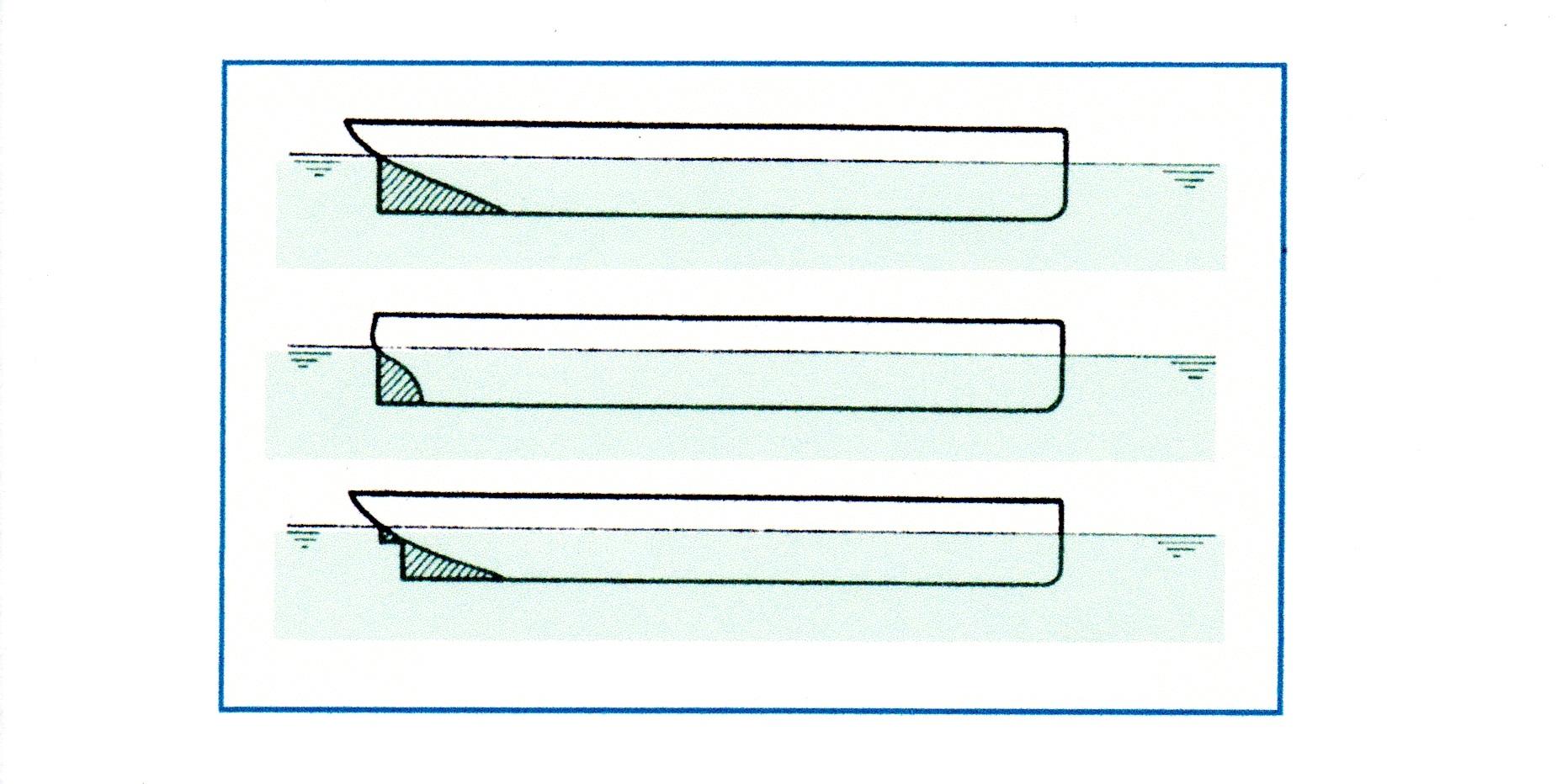
Si osserva che, in pratica, un’imbarcazione può al massimo avere qualità intrinseca di moto rettilineo. La stabilità di rotta si può aumentare con mezzi di governo fissi, come i pieni di poppa delle navi (Figura 4), ottenendo a volte imbarcazioni troppo stabili. In tal caso la manovrabilità con il timone può essere compromessa.
Generalmente gli attributi di stabilità nel piano orizzontale con mezzi di governo fissi sono indipendenti dalla velocità. In altre parole se un’imbarcazione ha una stabilità di moto rettilineo alle basse velocità, l’avrà anche alle velocità più elevate e viceversa. Un’imbarcazione di grande momento d’inerzia di massa (grandi masse distribuite all’estremità prodiera e poppiera) non devierà repentinamente dalla sua rotta e non tornerà facilmente ad essa; un’imbarcazione di piccolo momento d’inerzia di massa devierà subito dalla sua rotta, però tornerà più facilmente ad essa. Per avere, nel primo caso, più facili dirottamenti si dovrà sistemare un timone che a piccoli angoli dia grandi forze; nel secondo caso si sistemerà, invece, un timone che agli stessi angoli dia forze più piccole.
Molte volte la dissimmetria delle spinte dei propulsori e/o della resistenza all’avanzamento, dovuta questa ultima alla dissimmetria del flusso sullo scafo, fanno sì che la rotta rettilinea sia tenuta solamente con un certo angolo di barra.
Il flusso lungo i due fianchi di un’imbarcazione che non ha disavviamenti in carena e si muove senza timoni in acqua tranquilla è simmetrico. Le forze trasversali all’imbarcazione, che possono essere prodotte dal moto dell’acqua lungo lo scafo, per la simmetria dell’imbarcazione, si bilanciano a vicenda.
Supponendo che la spinta prodotta dall’elica e la resistenza della imbarcazione agiscano sul piano di simmetria, l’imbarcazione procederà su una rotta rettilinea finché non intervenga una causa disturbatrice esterna.
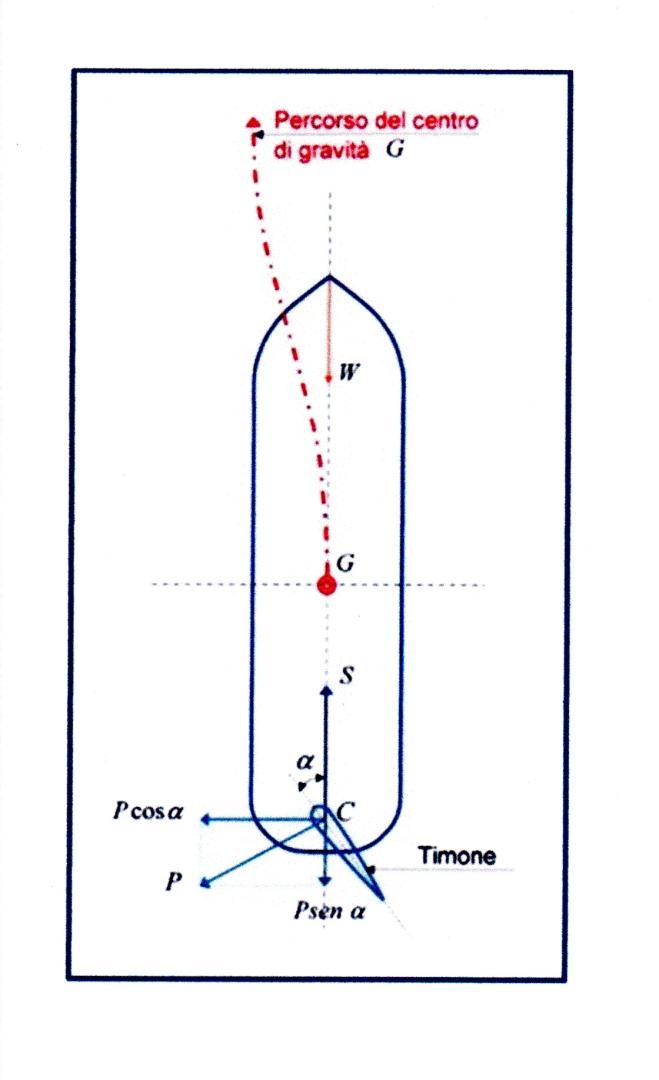
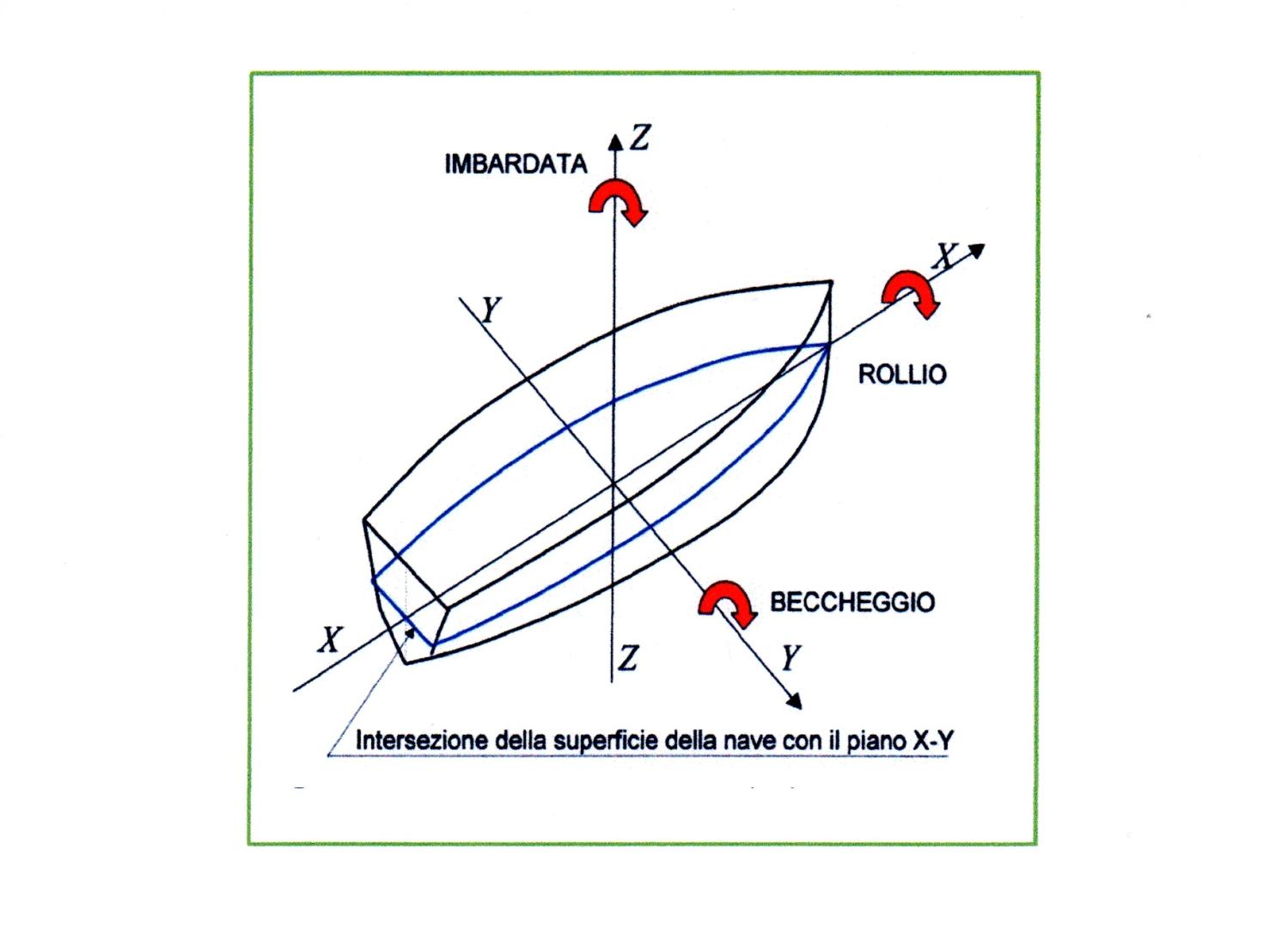
Non appena si porta il timone ad un angolo di barra \(α\) nasce una forza \(P\) (Figura 5). Tale forza provoca in genere un moto trasversale dell’imbarcazione e rotazioni intorno a tre assi perpendicolari fra loro (Figura 6).
Angelo Sinisi