Il joystick di governo, un accessorio per tutti i motori
Il joystick di governo oppure, se preferite, di pilotaggio o guida di un'imbarcazione, è una delle "invenzioni" più rilevanti del terzo millennio. Derivato da un attrezzo di gioco che consente all’indicatore di spostarsi in tutte le direzioni e di ruotare a destra o a sinistra, il controller joystick è entrata prepotentemente nei sistemi di guida delle imbarcazioni.
Ma come funziona? E cosa lo rende possibile?
Cominciamo dalla seconda domanda. Siamo abituati, pensando ad una imbarcazione con due motori, a considerare i motori collegati da una barra che li obbliga allo stesso brandeggio, ed alimentati da un sistema bileva che ne stabilisce il regime in modo che sia uguale per entrambi: le manovre che ne derivano, e che impegnano il pilota negli attracchi o nell’ormeggio, possono al massimo essere legate alle inversioni ed al regime di ciascuno dei motori.
Poi qualcuno ha pensato che i due motori possono agire in maniera indipendente, aumentando i parametri da combinare nella manovra per renderla più agevole, ma complicando la possibilità contemporanea di azione da parte del pilota, il quale si dovrebbe fare carico di: 1) angolo di brandeggio a destra o a sinistra per ciascun motore (quindi tanti timoni per quanti sono i motori); 2) senso della spinta (avanti o indietro) di ciascun motore; 3) regime di potenza di ciascun motore. Troppe cose per una sola persona, e troppe anche per due o tre, che non saprebbero coordinarsi per ottenere l’effetto voluto. Allora si affida tutto al computer di bordo che non ha problemi a coordinare tutti i motori in direzione, regime e senso della spinta in modo da ottenere una docilità di manovra altrimenti impossibile.
Ma, dicevamo, che cosa occorre?
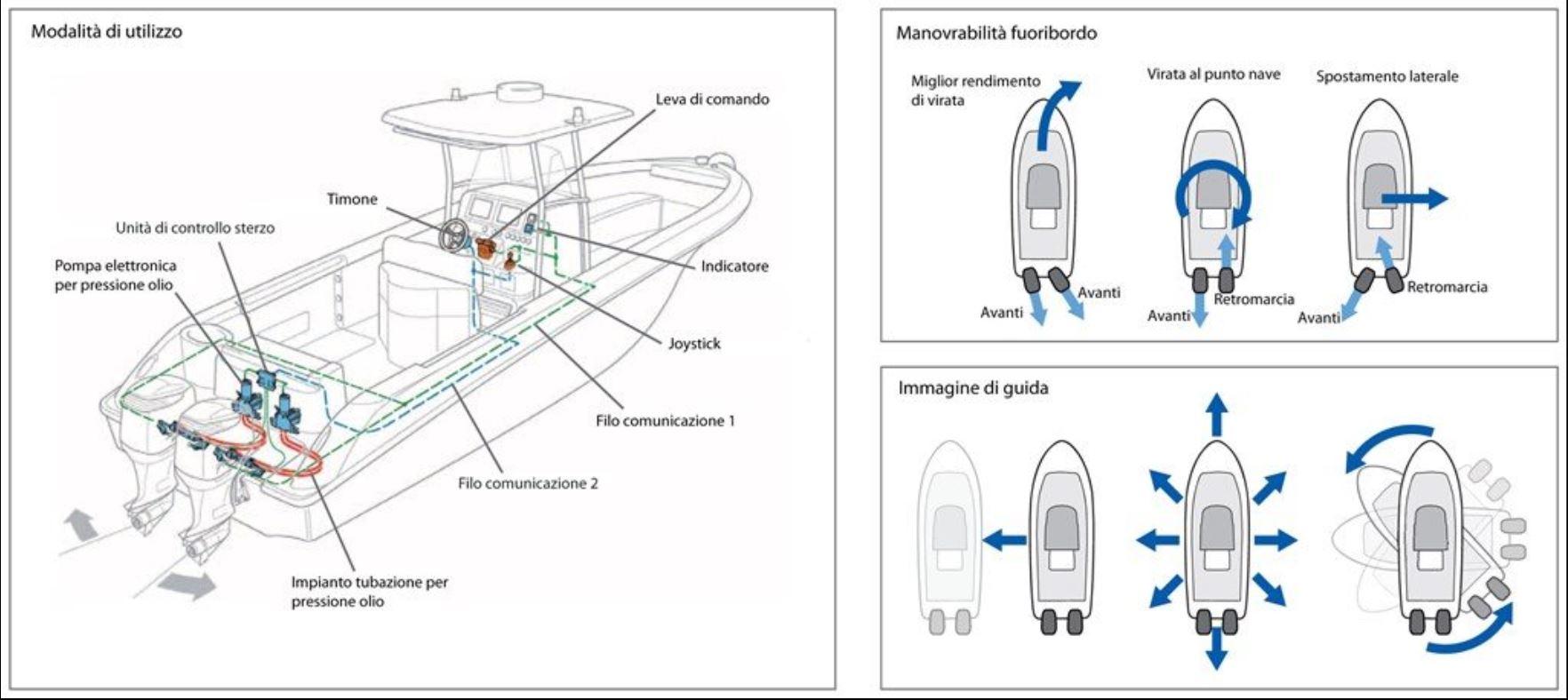
Se fino a qualche tempo fa era necessaria una motorizzazione almeno bimotore con un computer di bordo che gestisse i due motori e l’eventuale spinta delle eliche di prua e di poppa, da qualche tempo il joystick è disponibile addirittura per le imbarcazioni monomotore entrobordo, con una versatilità ridotta e a condizione che ci sia un thruster. Se l’integrazione con i thruster può infatti essere opzionale con quei tipi di propulsioni che orientano la spinta e non hanno bisogno di timone, quindi fuoribordo, entrofuoribordo, POD tipo IPS o Zeus, e idrogetti, questa diviene invece necessaria se la barca monta un solo motore, come nei sistemi Joystick Piloting proposti dalla Mercury.
Nel caso di barche che prevedono l’installazione di due o più motori, occorre ancora che la poppa sia abbastanza larga da consentire una distanza tra i propulsori sufficiente a non creare interferenze letali delle eliche, quando i motori sono orientati in maniera diversa (tutto a destra quello di sinistra e tutto a sinistra quello di destra). Ma poi occorre che la timoneria sia idraulica in modo da reagire con precisione alle richieste del computer, e che idraulico o elettronico sia il comando del cambio in modo da evitare strappi nelle inversioni di marcia che possono essere richieste dal computer in modo molto frequente. Ed elettronico deve essere anche il controllo del regime (la manetta) che deve avere una precisione impossibile ad un azionamento semplicemente meccanico. Basti pensare che per esempio per evitare innesti ed inversioni troppo brusche alcuni motori sono progettati in modo da azzerare l’acceleratore nell’attimo in cui si innesta la marcia.
Tutte queste caratteristiche dei motori si possono trovare solo in motori di elevata potenza che posseggano già, nel progetto, una gestione elettronica non solo del funzionamento ma anche degli azionamenti.
Come funziona
L’orientamento dei motori caratterizza la linea di azione della spinta. Quando i motori sono paralleli le loro linee di azione non si incontrano e la direzione è quella comune: unico mezzo per agire rimane il senso della spinta e la sua forza: così, se si mette tutto avanti o tutto indietro per entrambi i motori, la poppa verrà spinta o tirata nella direzione che hanno le eliche. Se si mette uno avanti e l’altro indietro si provocherà una rotazione della poppa che diventa tanto più importante quanto più leggera è l’imbarcazione e quanto più le eliche sono vicine al suo baricentro, nel quale immaginiamo concentrata la massa della barca. Un pilota molto esperto riesce a far derapare la imbarcazione, ma solo nella direzione del massimo angolo di brandeggio.
Quando invece i motori possono essere orientati in maniera indipendente, le loro linee di spinta, in avanti o indietro, si incontrano in un punto generando una forza risultante applicata in quel punto e di direzione stabilita dalla composizione delle due spinte generate dai motori: succede così che si possono determinare, cambiano l’angolo dei due motori, una infinità di punti di applicazione, e, cambiando entità e direzione della spinta, una infinità di direzioni e di forze. Se per esempio i due motori sono orientati in modo che le loro direzioni di spinta passino per il baricentro, la risultante delle due spinte agisce sul baricentro, e la composizione delle forze ottenute variando direzione ed intensità di ognuno dei due motori genera una infinità di forze, rendendo possibile lo spostamento della barca parallelamente a se stessa o in derapage in ogni direzione. Spostando il joystick nella direzione in cui vogliamo muovere la imbarcazione senza farla ruotare, sarà il computer a selezionare direzione, senso e forza delle due spinte in modo da ottenere come risultante la traslazione desiderata. Lo stesso succede per la rotazione su se stessa.
Collegando il computer a un GPS si può ottenere che la barca resti ferma e nella posizione voluta anche in presenza di vento o di correnti: collegando il joystick ad una trasmittente potremmo, se fosse consentito, manovrare la barca dal molo, farci venire a prendere in porto e farla tornare al largo ad aspettarci, proprio come se fosse un videogioco.
Ma, a parte considerazioni estreme e avveniristiche, il joystick è un azionamento con l’aspetto di un pomello verticale che può essere ruotato in senso orario o antiorario per far girare la barca su se stessa accrescendo (entro certi limiti) la velocità di rotazione se si continua a ruotare il pomello; alla stessa maniera spingendo il pomello verso una delle direzioni dei 360 gradi si ottiene la “traslazione” della barca in quella direzione, accrescendo la velocità del movimento se si spinge il pomello. Il sistema non entra in funzione quando le leve di controllo non sono a folle e si esclude automaticamente se tali leve vengono azionate.
Oltre ai fabbricanti di piedi poppieri, di POD per entrobordo, per intenderci Mercruiser e Volvo Penta, il joystick è entrato come optional nell’offerta di tutti i produttori di motori e di sistemi di trasmissione, compresi gli idrogetti, le linee d’asse e le eliche di superficie. Per ciò che concerne i motori fuoribordo, sono richiedibili su modelli di elevata potenza di Evinrude (150-300 Cv), Mercury (250 - 400 CV Verado), Yamaha (225-350 CV) e Suzuki (150-350 CV). I costi variano da 7.000 a 15.000 euro per due motori fuoribordo.
Alfredo Gennaro